Brief Research Overview
A team of multiple robots is very appealing because it can
perform various tasks that a single robot cannot, or can
perform them more effectively and flexibly. This makes
multi-robot systems an active area of research. Our focus is
on the design, planning, coordination, and control of
multi-robot teams, and on developing algorithms and systems
that can be used more effectively and practically in dynamic
and irregular real-world applications such as search and
rescue and environmental monitoring. In particular, we have
conducted significant research on how to achieve scalability
and stability in a multi-robot system through distributed
control.
You can learn more about our current and past research on multi-robot systems below.
Distributed Rendezvous and Formation Control (2017
- Present)
Description: We study the problem of
rendezvous, in which robots explore an unknown environment
with minimal communication and arrive at a predetermined
location. The problem of rendezvous is common in nature, as
animals in migration share information about food and water
and then rendezvous at those locations. Humans also face
similar issues when we need to meet specific people at
specific places, which also applies to multi-agent robotic
systems. With the development of technologies such as
localization, ubiquitous wireless communication, and advanced
computation capabilities, enhanced rendezvous control has the
potential to be applied in a wider range of scenarios, such as
intelligent warehouses and urban search and rescue. Our
research aims to develop a bounded, distributed rendezvous
control mechanism in cluttered environments. The robots in
this environment have little knowledge of the environment but
can rendezvous at the destination while overcoming challenges
such as communication being blocked by large obstacles and
paths being blocked by small obstacles, using proper
decision-making mechanisms and obstacle avoidance algorithms.
We also aim to find a robotic rendezvous control solution that
not only handles communication unavailable situations and
obstacle avoidance, but also maintains an efficiency-prior
trajectory.
Grants: NSF (CNS #1439717), Purdue University
People: Vishnunandan Venkatesh, Shaocheng Luo, Jun Han Bae, Ramviyas Parasuraman
Selected Publications:
- L. N. Vishnunandan Venkatesh and Byung-Cheol Min,
"ZeroCAP: Zero-Shot Multi-Robot Context Aware Pattern
Formation via Large Language Models", IEEE International
Conference on Robotics and Automation (ICRA), Atlanta, USA,
19-23 May, 2025. (Accepted) Paper
Link, Video
Link
- Shaocheng Luo, Jonghoek Kim, and Byung-Cheol Min, "Asymptotic Boundary Shrink Control with Multirobot Systems", IEEE Transactions on Systems, Man, and Cybernetics: Systems, Vol. 52, No. 1, pp. 591-605, Jan. 2022. Paper Link, Video Link
- Ramviyas Parasuraman, Jonghoek Kim, Shaocheng Luo, and Byung-Cheol Min, "Multi-Point Rendezvous in Multi-Robot Systems", IEEE Transactions on Cybernetics, Vol. 50, Issue 1, pp. 310-323, Jan. 2020. Paper Link, Video Link
- Shaocheng Luo, Jonghoek Kim, Ramviyas Parasuraman, Jun Han Bae, Eric T. Matson, and Byung-Cheol Min, "Multi-robot Rendezvous Based on Bearing-aided Hierarchical Tracking of Network Topology", Ad Hoc Networks, Vol. 86, pp. 131-143, April 2019. Paper Link, Video Link
- Shaocheng Luo, Jun Han Bae, and Byung-Cheol Min, "Pivot-based Collective Coverage Control with a Multi-robot Team", 2018 IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO 2018), Kuala Lumpur, Malaysia, December 12-15, 2018. Paper Link, Video Link
- Ramviyas Parasuraman and Byung-Cheol Min, "Consensus Control of Distributed Robots Using Direction of Arrival of Wireless Signals", International Symposium on Distributed Autonomous Robotic Systems 2018 (DARS 2018), Boulder, CO, USA, Oct 15-17, 2018. Paper Link, Video Link, GitHub Link
Social Behavior in Multi-robot Systems (2017
- Present)
Description: Individuals can benefit in
a social group by supporting and helping each other for
survival. This is a well-known phenomenon in nature, and in
this research, our goal is to apply the same principles in a
multi-robot system to improve the robustness and
survivability of the robots.
Traditionally, research on multi-robot
systems has focused on developing application-specific
control algorithms that adapt individual robots to
operational environments and specific tasks, without
considering the benefits of being in a social group.
However, given the unpredictable nature of various
operational environments and autonomous mission
requirements, it is impractical, expensive, and still lacks
robustness in survivability to design individual robots that
can handle all possible scenarios. In contrast, we believe
that introducing a social group aspect to the multi-robot
system may provide a unique and robust way of dealing with
such cases.
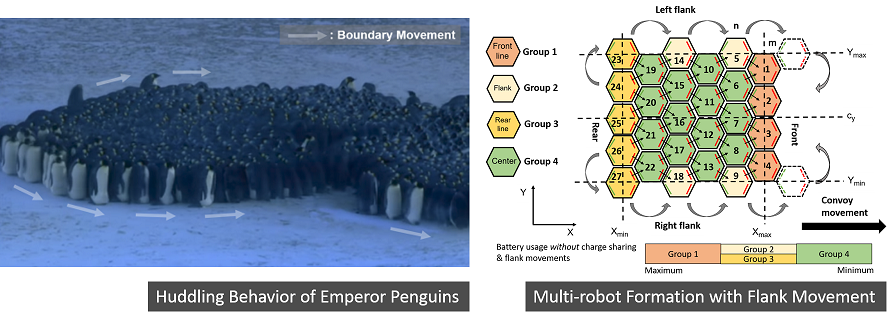
For our initial work, we drew inspiration
from the huddling behavior of Emperor Penguins in
Antarctica, where they share body heat and take turns being
in the huddle centers to survive the harsh conditions of the
Antarctic winters as a group.
Potential research on this topic includes
energy sharing between heterogeneous robotic agents, the use
of machine learning techniques for distributed position
shuffling within the group to survive damaging external
stimuli, and distributed control techniques for cooperative
object transportation, with a focus on minimizing individual
health loss for the long-term survival of the multi-robot
system.
Grants: Purdue University
People: Weizheng Wang, Tamzidul Mina, Shyam Sundar Kannan, Wonse Jo, Jee Hwan park
Selected Publications:
- Weizheng Wang, Aniket Bera, and Byung-Cheol Min, "Hyper-SAMARL: Hypergraph-based Coordinated Task Allocation and Socially-aware Navigation for Multi-Robot Systems", IEEE International Conference on Robotics and Automation (ICRA), Atlanta, USA, 19-23 May, 2025. (Accepted) Paper Link, Video Link, Website Link
- Tamzidul Mina, Wonse Jo, Shyam Sundar Kannan, and Byung-Cheol Min, "Beacon-based Distributed Structure Formation in Multi-agent Systems", 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), Detroit, USA, October 1-5, 2023. Paper Link, Video Link
- Tamzidul Mina, Yogang Singh, and Byung-Cheol Min, "Maneuvering Ability-Based Weighted Potential Field Framework for Multi-USV Navigation, Guidance and Control", Marine Technology Society Journal, Vol. 54, No. 4, pp. 40-58, 2020. Paper Link
- Tamzidul Mina, Maliha Hossain, Jee Hwan Park, and Byung-Cheol Min, "Efficient Resource Distribution by Adaptive Inter-agent Spacing in Multi-agent Systems", 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6-9 October, 2019. Paper Link, Video Link
- Tamzidul Mina and Byung-Cheol Min, "Penguin Huddling Inspired Distributed Boundary Movement for Group Survival in Multi-robot Systems using Gaussian Processes", 2018 IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO 2018), Kuala Lumpur, Malaysia, December 12-15, 2018. Paper Link, Video Link
- Tamzidul Mina and Byung-Cheol Min, "Penguin Huddling-inspired Energy Sharing and Formation Movement in Multi-robot Systems", 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, August 6-8, 2018. Paper Link, Video Link
Reliability and Safety of Autonomous
Multi-Agent Systems (2017 - 21)
Description: Autonomous cars, also
known as driverless vehicles or self-driving cars, can
deploy safety technologies such as collision warning,
automatic emergency braking, and Vehicle-to-Vehicle
technologies. In the future, these systems in all vehicles
have the potential to achieve zero fatalities, zero
injuries, and zero accidents. However, there is a new
challenge that needs to be addressed in the realm of
autonomous cars: cybersecurity.
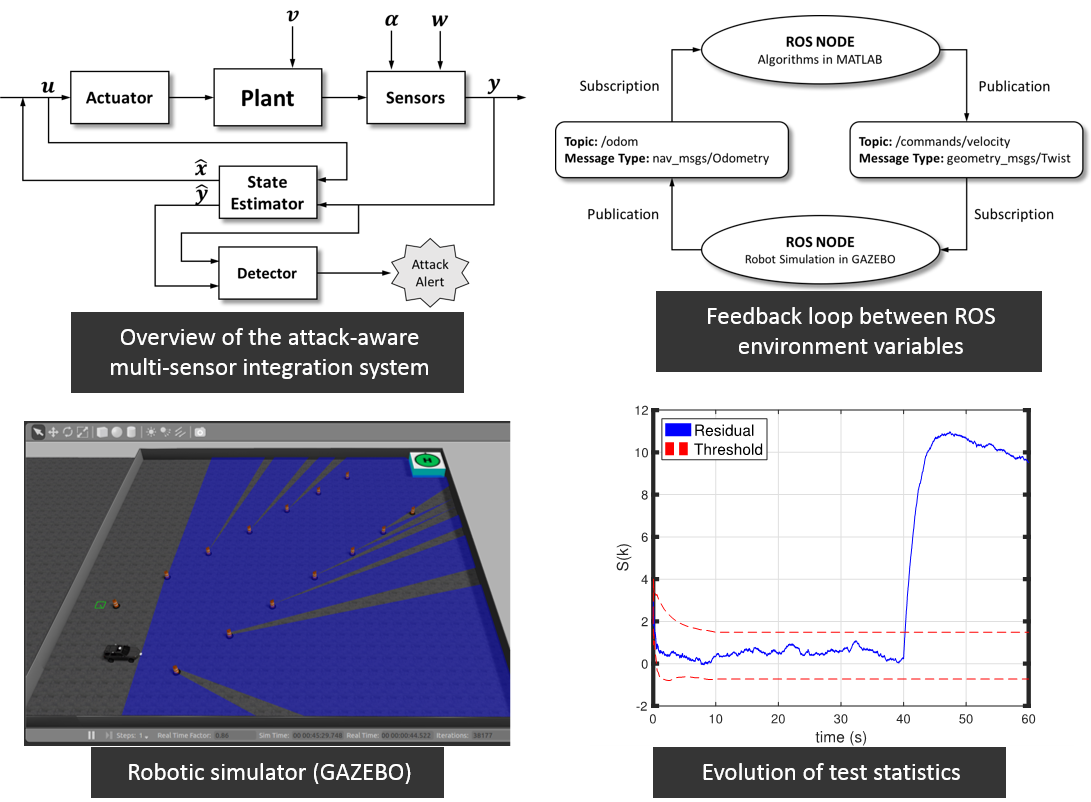
As a first step, we propose an
attack-aware multi-sensor integration algorithm for the
navigation system of autonomous cars. We adopt a Fault
Detection and Isolation (FDI) scheme for detecting
cyberattacks on navigation systems. Specifically, we use a
discrete Extended Kalman Filter (EKF) to construct robust
residuals in the presence of noise. Our proposed method
uses a parametric statistical tool for detecting attacks
based on the residuals and their properties in discrete
time signals and dynamic systems. It is based on a
measurement history, rather than a single measurement at a
time. These approaches enable our proposed multi-sensor
integration algorithm to generate quick detection and low
false alarms rates that are suitable for the applications
of dynamic systems. As a case study, we consider INS/GNSS
integration for autonomous vehicle navigation systems and
test it with software-in-the-loop simulation (SILS).
In addition, we consider attack
detection algorithms for autonomous multi-vehicle systems
with imperfect information. This research addresses how a
locally controlled autonomous agent can be identified by
other agents if it has been compromised and how to make
decisions with the ultimate goal of recovering system
functionality and safety.
Grants: NIJ
People: Sangjun Lee, Yongbum Cho
Selected
Publications:
- Sangjun Lee and Byung-Cheol Min, "Distributed Control of Multi-Robot Systems in the Presence of Deception and Denial of Service Attacks", arXiv preprint, arXiv:2102.00098, 2021. Paper Link, Video Link
- Sangjun Lee and Byung-Cheol Min, "Distributed Direction of Arrival Estimation-aided Cyberattack Detection in Networked Multi-Robot Systems", 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018), Madrid, Spain, October 1-5, 2018. Paper Link, Video Link
- Sangjun Lee, Yongbum Cho, and Byung-Cheol Min, "Attack-aware Multi-sensor Integration Algorithm for Autonomous Vehicle Navigation Systems", 2017 IEEE International Conference on Systems, Man and Cybernetics (SMC), Banff, Canada, 5-8 October, 2017. Paper Link, Video Link
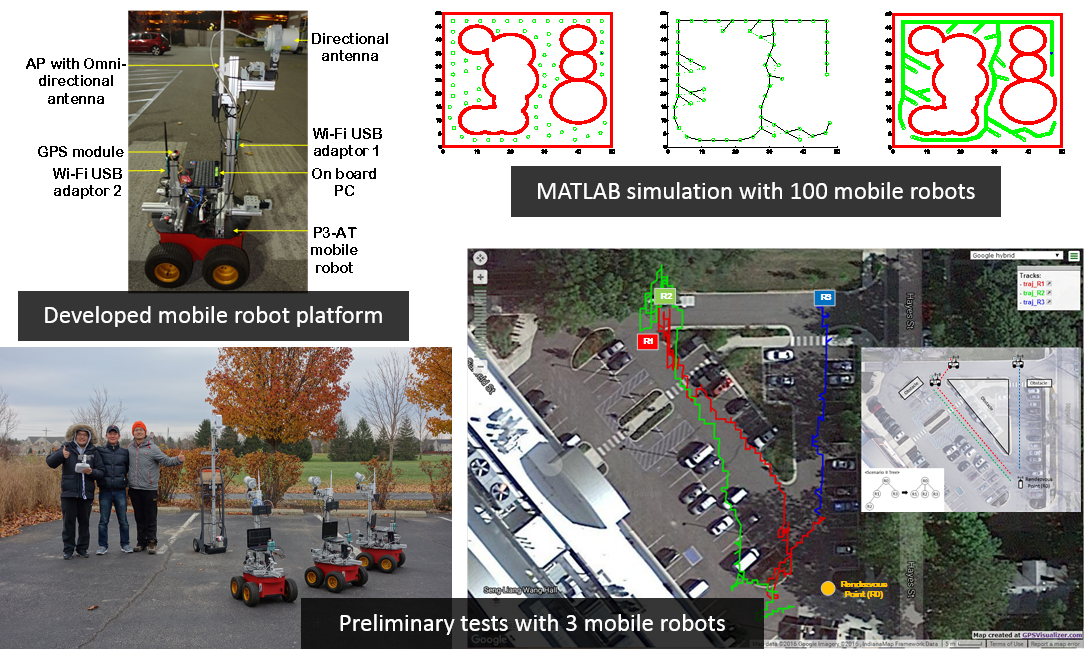
A Directional Antenna-based Leader-follower Robotic Convoy System (2013 - 18)
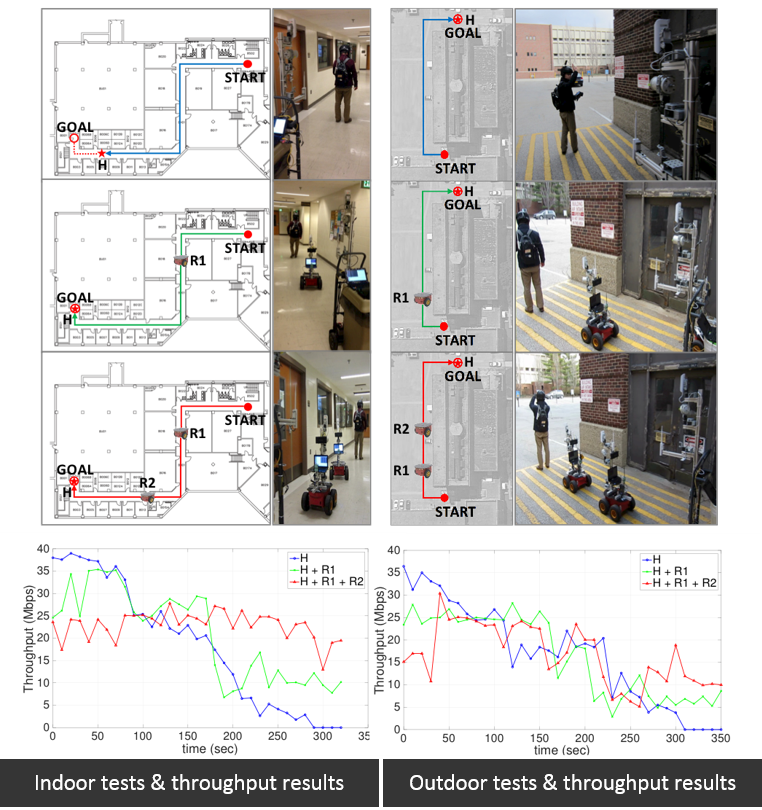
Description: In this research, we
present a directional antenna-based leader-follower
robotic relay system that can establish end-to-end
communication in complicated and dynamically changing
environments. The system consists of multiple networked
robots, one of which is a mobile end node and the others
are leaders or followers that act as radio relays. Each
follower uses directional antennas to relay a
communication radio and to estimate the location of the
leader robot as a sensory device. For bearing estimation,
we use a weight centroid algorithm (WCA) and provide a
theoretical analysis of its use in this work. We also
develop online, distributed control strategies using a
robotic convoy method that meet the scalability
requirements of robotic network systems and allow
cooperating robots to work independently. We evaluate the
performance of the proposed system through extensive
real-world experiments that successfully establish actual
communication between two end nodes.
Grants: Purdue University
People: Sangjun Lee, Ramviyas Parasuraman
Selected
Publications:
- Byung-Cheol Min, Ramviyas Parasuraman, Sangjun Lee, Jin-Woo Jung, and Eric T. Matson, "A Directional Antenna based Leader-Follower Relay System for End-to-End Robot Communications", Robotics and Autonomous Systems, Vol. 101, pp. 57-73, March 2018. Paper Link, Video Link 1, Video Link II
- Byung-Cheol Min, Eric T. Matson, and Jin-Woo Jung, “Active Antenna Tracking System with Directional Antennas for Enhancing Wireless Communication Capabilities of a Networked Robotic System", Journal of Field Robotics, Vol. 33, Issue 3, pp. 391-406, May 2016. Paper Link
- Byung-Cheol Min, Yongho Kim, Sangjun Lee, Jin-Woo
Jung, and Eric T. Matson, “Finding the Optimal Location
and Allocation of Relay Robots for Building a Rapid
End-to-end Wireless Communication", Ad Hoc Networks,
Vol. 39, Issue 15, pp. 23-44, March 2016. Paper Link, Video Link I, Video Link II
Establishment of End-to-End Wireless Network with Mobile Robots (2013 - 16)
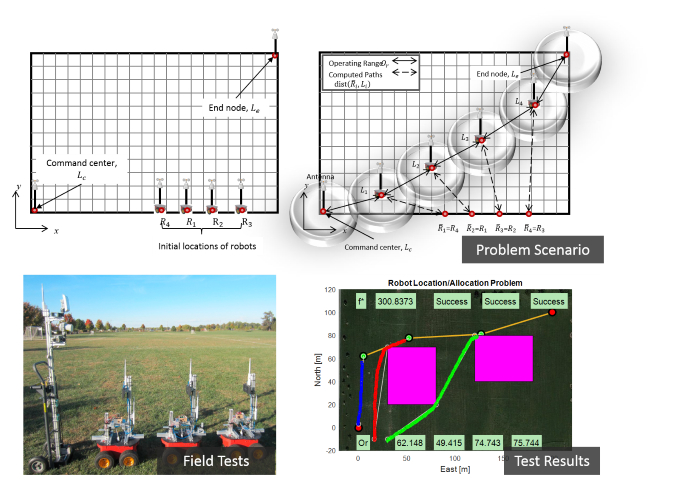
Description: In this research, we
address the fundamental problem of finding the optimal
location and allocation of mobile robots to establish
immediate end-to-end communication, a problem known as
the multi-robot deployment problem in networked
robotics. To do this, we formulate an end-to-end
communication problem in a general optimization form
with constraints that consider the operation of the
robots and the types of antennas. We also consider
constraints on the propagation of radio signals and
the locations of robots that are not feasible due to
physical obstacles in a dense space. To solve the
optimization problem, we investigate the use of
evolutionary optimization techniques such as Genetic
Algorithms (GA) and Particle Swarm Optimization (PSO).
Grants: Purdue University
People: Sangjun Lee
Selected
Publications:
- Byung-Cheol Min, Yongho Kim, Sangjun Lee, Jin-Woo
Jung, and Eric T. Matson, “Finding the Optimal
Location and Allocation of Relay Robots for Building
a Rapid End-to-end Wireless Communication", Ad Hoc
Networks, Vol. 39, Issue 15, pp. 23-44, March 2016.
Paper Link, Video Link I, Video Link II