
Brief Research Overview
Robot learning is a field of artificial intelligence focused
on algorithms that allow robots to learn to perform tasks more
intelligently. It is currently receiving significant attention
from the scientific community. The SMART Lab is focusing on
advanced deep learning and deep reinforcement learning methods
with the goal of improving the practicality of these methods
through learning from and more flexible interaction with
humans. We are specifically studying cognitive computing
methods to improve a robot's decision-making ability by
modeling and learning the fast and accurate decision-making
abilities of humans, and recognition methods to enable robots
to recognize and judge the identity of an object/scene in
real-time even in dynamic environments and with limited
information.
You can learn more about our current and past research on robot learning below.
Socially-Aware Robot Navigation (2021 -
Present)
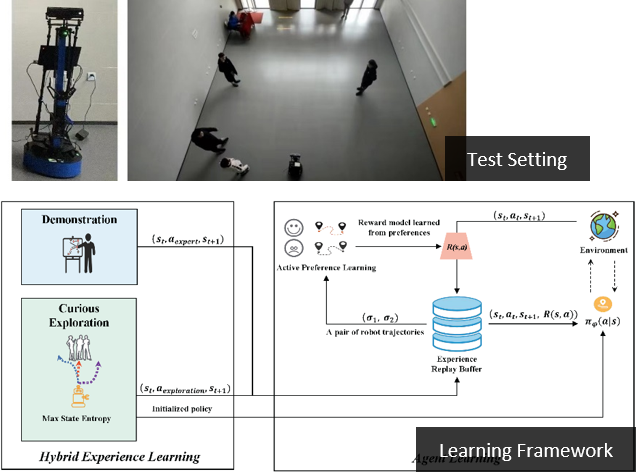
Description: Socially aware robot
navigation, in which a robot must optimize its trajectory to
maintain comfortable and compliant spatial interactions with
humans while also reaching its goal without collisions, is a
fundamental but challenging task in the context of human-robot
interaction. While existing learning-based methods have
performed better than model-based ones, they still have
drawbacks: reinforcement learning relies on handcrafted
rewards that may not effectively quantify broad social
compliance and can lead to reward exploitation problems, and
inverse reinforcement learning requires expensive human
demonstrations. The SMART Lab investigates various practical
and theoretical robot learning topics in the context of robot
navigation. For example, we recently proposed a
feedback-efficient active preference learning (FAPL) approach
for socially aware robot navigation, which translates human
comfort and expectation into a reward model that guides the
robot agent to explore latent aspects of social compliance.
The proposed method improved the efficiency of human feedback
and samples through the use of hybrid experiential learning,
and we evaluated the benefits of the robot behaviors learned
from FAPL through extensive experiments.
Grant: NSF
People: Ruiqi
Wang, Weizheng
Wang
Project Website: https://sites.google.com/view/san-fapl;
https://sites.google.com/view/san-navistar
Selected Publications:
- Weizheng Wang, Ruiqi Wang, Le Mao, and Byung-Cheol Min, "NaviSTAR: Benchmarking Socially Aware Robot Navigation with Hybrid Spatio-Temporal Graph Transformer and Active Learning", 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), Detroit, USA, October 1-5, 2023. Paper Link, Video Link, GitHub Link
- Ruiqi Wang, Weizheng Wang, and Byung-Cheol Min, "Feedback-efficient Active Preference Learning for Socially Aware Robot Navigation", 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022), Kyoto, Japan, October 23-27, 2022. Paper Link, Video Link, GitHub Link
Visual Localization and Mapping (2022 -
Present)
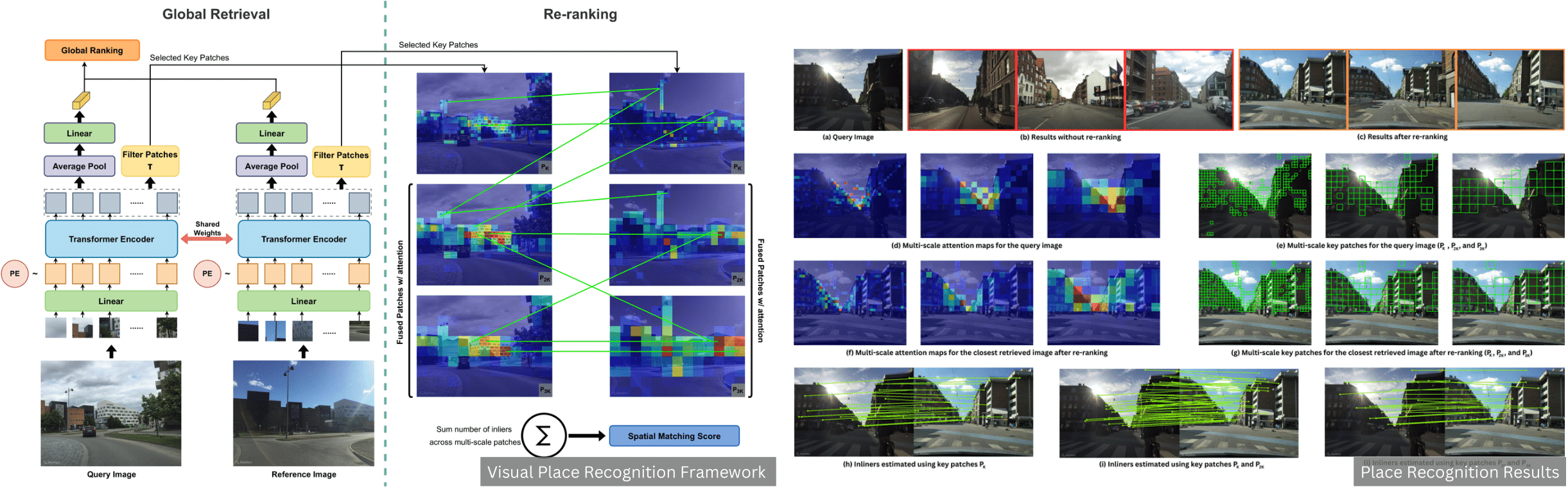
Description: Visual localization enables autonomous vehicles
and robots to navigate based on visual observations of their operating environment.
In visual localization, the agent estimates its pose based on the image from the camera.
The operating environment of the agent can undergo various changes due to illumination,
day and night, seasons, structural changes, and so on. In vision-based localization,
it is important to adapt to these changes that can significantly impact visual perception.
The SMART lab investigates into developing methods that enable autonomous agents to robustly
localize despite these changes in the surroundings. For example, we developed a visual place
recognition system that aids the autonomous agent in identifying its location on a large-scale
map by retrieving a reference image that matches closely with the query image from the camera.
The prposed method utilizes consice descriptors from the image, so that the image process can be
done rapidly with less memory consumption.
Grant: Purdue University
People: Shyam Sundar Kannan
Learning-based Robot Recognition (2017 -
Present)
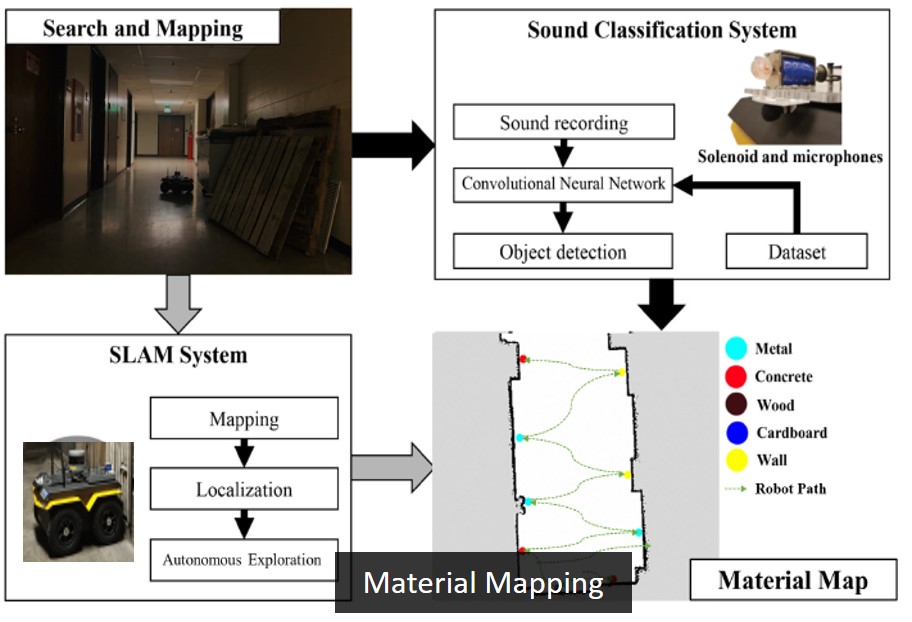
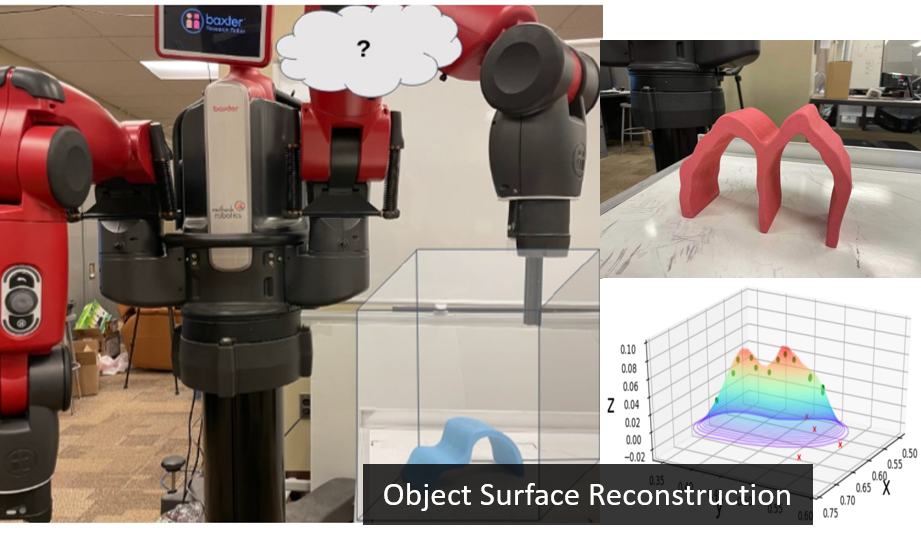
Description:The SMART Lab is researching
learning-based robot recognition technology to enable robots
to recognize and identify objects/scenes in real-time with
the same ease as humans, even in dynamic environments and
with limited information. We aim to apply our research and
developments to a variety of applications, including the
navigation of autonomous robots/cars in dynamic
environments, the detection of malware/cyberattacks, object
classification and reconstruction, the prediction of the
cognitive and affective states of humans, and the allocation
of workloads within human-robot teams. For example, we
developed a system in which a mobile robot autonomously
navigates an unknown environment through simultaneous
localization and mapping (SLAM) and uses a tapping mechanism
to identify objects and materials in the environment. The
robot taps an object with a linear solenoid and uses a
microphone to measure the resulting sound, allowing it to
identify the object and material. We used convolutional
neural networks (CNNs) to develop the associated
tapping-based material classification system.
Grants: NSF, Purdue University
People: Wonse
Jo, Shyam
Sundar Kannan, Go-Eum
Cha, Vishnunandan
Venkatesh, Ruiqi
Wang
Selected Publications:
- Su Sun and Byung-Cheol Min, "Active Tapping via Gaussian Process for Efficient Unknown Object Surface Reconstruction", 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Workshop on RoboTac 2021: New Advances in Tactile Sensation, Interactive Perception, Control, and Learning. A Soft Robotic Perspective on Grasp, Manipulation, & HRI, Prague, Czech Republic, Sep 27 – Oct 1, 2021. Paper Link
- Shyam Sundar Kannan, Wonse Jo, Ramviyas Parasuraman, and Byung-Cheol Min, "Material Mapping in Unknown Environments using Tapping Sound", 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2020), Las Vegas, NV, USA, 25-29 October, 2020. Paper Link, Video Link
Application Offloading Problem (2018 -
22)
Description: Robots come with a variety
of computing capabilities, and running
computationally-intensive applications on robots can be
challenging due to their limited onboard computing, storage,
and power capabilities. Cloud computing, on the other hand,
provides on-demand computing capabilities, making it a
potential solution for overcoming these resource
constraints. However, effectively offloading tasks requires
an application solution that does not underutilize the
robot's own computational capabilities and makes decisions
based on cost parameters such as latency and CPU
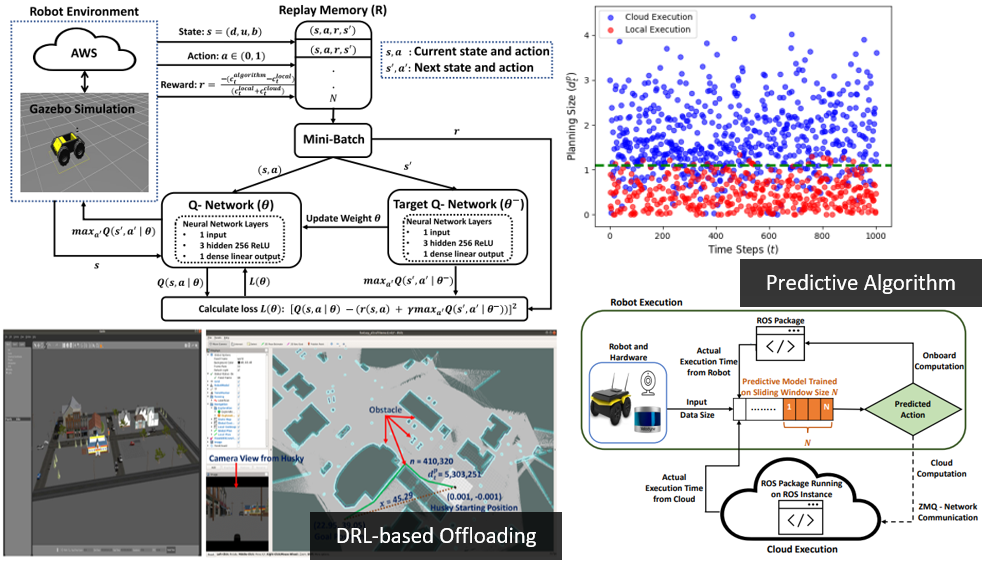
availability. In this research, we address the application
offloading problem: how to design an efficient offloading
framework and algorithm that optimally uses a robot's
limited onboard capabilities and quickly reaches a consensus
on when to offload without any prior knowledge of the
application. Recently, we developed a predictive algorithm
to predict the execution time of an application under both
cloud and onboard computation, based on the size of the
application's input data. This algorithm is designed for
online learning, meaning it can be trained after the
application has been initiated. In addition, we formulated
the offloading problem as a Markovian decision process and
developed a deep reinforcement learning-based Deep Q-network
(DQN) approach.
Grants: Purdue University
People: Manoj Penmetcha , Shyam Sundar Kannan
Selected Publications:
- Manoj Penmetcha and Byung-Cheol Min, "A Deep Reinforcement Learning-based Dynamic Computational Offloading Method for Cloud Robotics", IEEE Access, Vol. 9, pp. 60265-60279, 2021. Paper Link, Video Link
- Manoj Penmetcha, Shyam Sundar Kannan, and Byung-Cheol Min, "A Predictive Application Offloading Algorithm using Small Datasets for Cloud Robotics", 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Virtual, Melbourne, Australia, 17-20 October, 2021. Paper Link, Video Link