Field and Service Robotics
Autonomous Robotic Teams for a Real-Time Water Monitoring
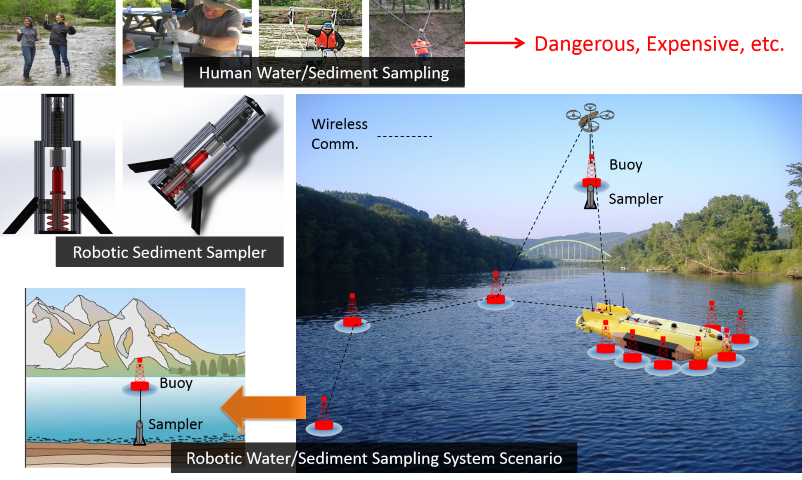
Water monitoring is an important task to
conserve natural resources such as rivers and lakes. For a
long period of time water monitoring methods have been based
on the human activities. For example, water sampling is the
most common human activity. However, this technique entails
some inherent disadvantages. In case of a large river with
fast flow, it is dangerous to the samplers. Moreover, it is
slow and costly because human samplers should travel to sites
for conducting a water sampling on their own. Also, it is
inefficient for a long-term and real-time monitoring.
Recently, autonomous water monitoring systems composed of
mobile sensors for real time monitoring and data collection
have been introduced. Unmanned Aerial Vehicle (UAV) and
Unmanned Surface Vehicle (USV) are proposed to overcome the
disadvantages of the human based methods.
The goal of this research is to develop a
continuous, real-time autonomous river monitoring system. We
are planning to develop the autonomous robotic teams that
integrate a variety of technologies including robots,
crowdsourcing, advanced region of interest (ROI) selection and
path planning. For this research ‘Wabash River’ is the
targeted test site because it is the one of the longest rivers
in the US and main stream in Indiana state. This research is
at the beginning stage. Based on the needs assessment, this
system will be iteratively designed to be fully capable of
various tasks, such as water sampling, water pollution
monitoring, sediment sampling, and early flood warning.
Distributed Rendezvous Control in Cluttered Environments
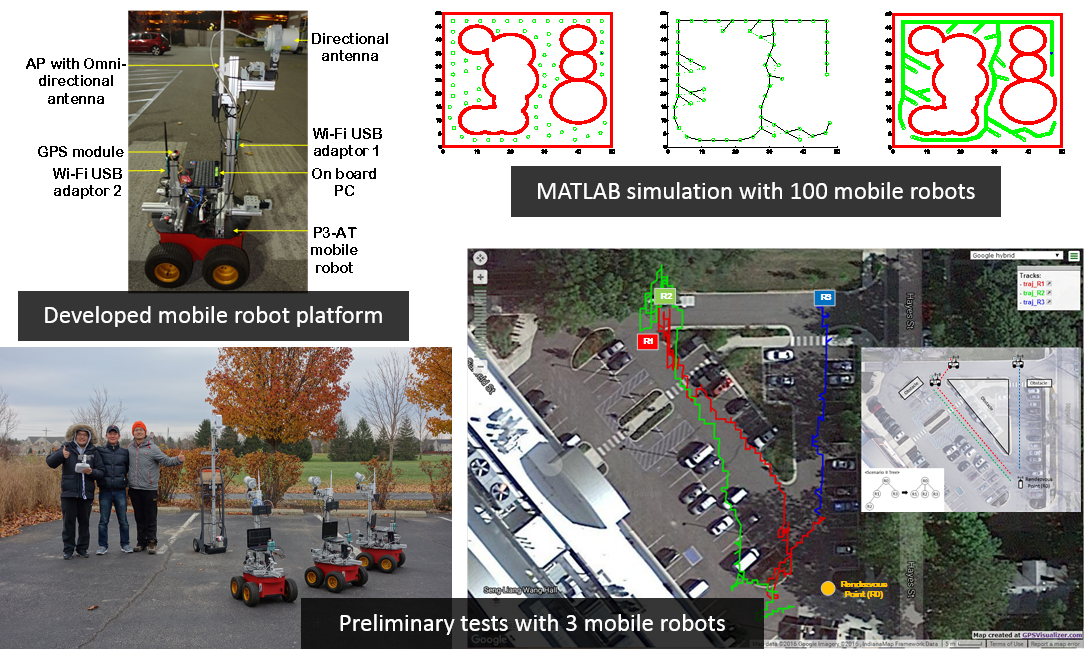
We consider the rendezvous problem as
robots exploring the unknown environment with minimum
communication and arrive at the selected rendezvous
location. The problem of rendezvous is ubiquitous in nature.
Animals in migration are able to share information about
food and water thus the whole group rendezvous at those
locations. Human also have same issue as we need to meet
specific people in specific place, which is applied still in
multi-agent robotic systems. With emerging technologies such
as localization, ubiquitous wireless communication, and
advanced computation capability, enhanced rendezvous control
shall bring wider application scenarios like intelligent
warehouse and urban search and rescue. The purpose of this
research is to develop a bounded distributed rendezvous
control mechanism in cluttered environment. The robots
within this environment have basically none knowledge of the
environment, but can rendezvous at the destination while
conquering the limitations such as communication being
blocked by large obstacles, and path blocked by small
obstacles, with proper decision making mechanism and
obstacle avoidance algorithms. Meanwhile, the efficiency in
rendezvous is also considered, we try to figure out robotic
rendezvous control which not only handles communication
unavailable occasions and obstacle avoidance, but also
maintain an efficiency-prior trajectory.
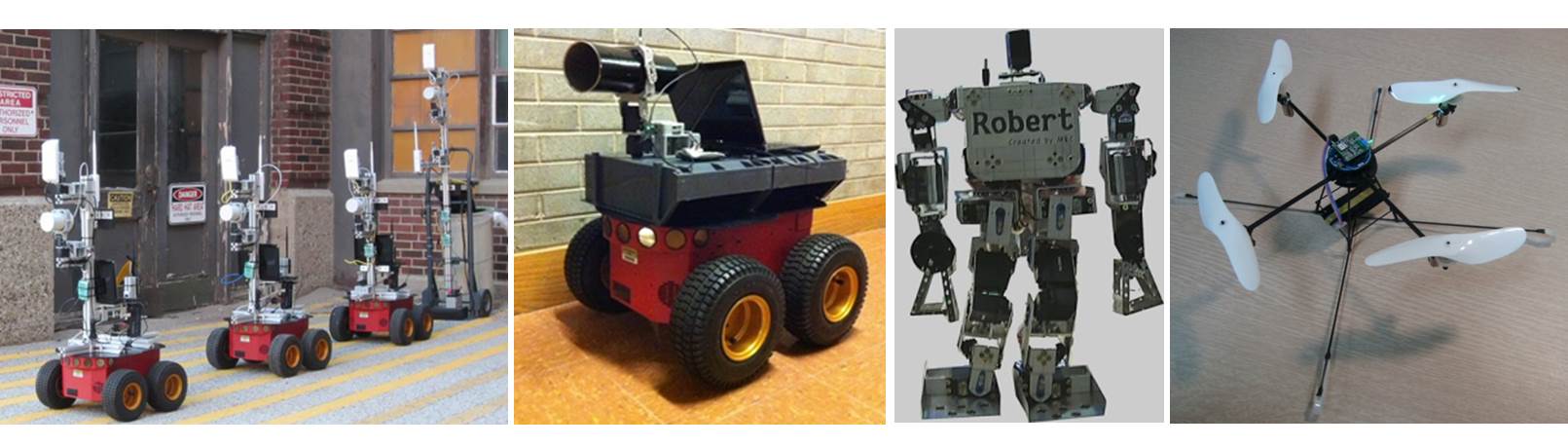
Social behavior in multi-robot systems
Individuals can benefit in a social
group by looking out for one another for support and
survival. It is a proven phenomenon in nature and in this
research our goal is to apply the same principles in a
multi-robot system to improve robot survivability
robustness.
Traditionally, research on multi-robot
systems has focused on developing application specific
control algorithms while adapting individual robots in the
group to operational environments and specific tasks
without explicitly considering the advantages of being in
a social group. However, given the unpredictable nature of
various operational environments and autonomous mission
requirements, designing individual robots that can take
into account all possible scenarios is unfeasible,
expensive and still lack robustness in survivability. In
contrast, we believe introducing a social group aspect to
the multi-robot system may provide a unique and robust way
of dealing with such cases.
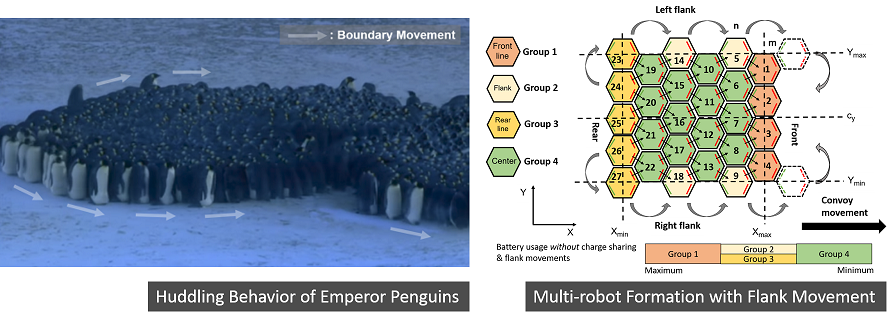
For our initial work, social behavioral
inspiration was taken from the Huddling behavior of
Emperor Penguins in the Antarctic where they share body
heat and take turns being in the huddle centers to survive
conditions as severe as Antarctic winters as a group.
Potential research on the topic include
energy sharing between heterogeneous robotic agents,
application of machine learning techniques for distributed
position shuffling within the group to survive damaging
external stimuli, distributed control techniques for
cooperative object transportation specifically focusing on
minimal individual health loss for long term survival of
the multi-robot system.
Reliability and Safety of Autonomous Multi-Agent Systems
Today's autonomous cars, otherwise
known as driverless vehicles or self-driving cars, enable
the deployment of safety technologies, such as collision
warning, automatic emergency braking, and
Vehicle-to-Vehicle technologies. In the near future, these
systems in all vehicles will help to achieve zero
fatalities, zero injuries, and zero accidents. However,
behind the potential of these innovations, there is new
challenge on autonomous cars that still need to address:
cybersecurity.
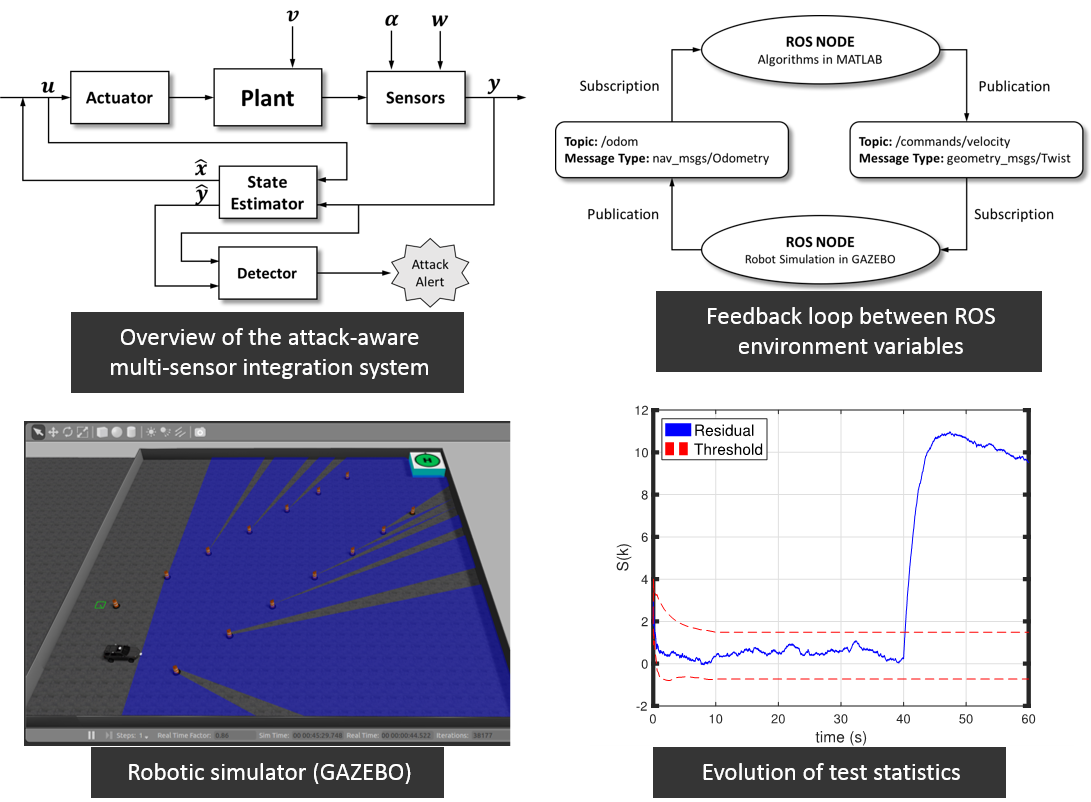
As the first step, we propose an
attack-aware multi-sensor integration algorithm for the
navigation system. A Fault Detection and Isolation (FDI)
scheme is adopted for the detection of cyberattacks on
navigation systems. Particularly, a discrete Extended
Kalman Filter (EKF) is employed to construct robust
residuals in the presence of noise. The proposed method
uses a parametric statistical tool for detecting attacks
based on the residuals in properties of discrete time
signals and dynamic systems. It is based on a measurement
history rather than a single measurement at a time. These
approaches enable the proposed multi-sensor integration
algorithm to generate a quick detection and low false
alarms rate that are suitable to the applications of
dynamic systems. Finally, as a case study, INS/GNSS
integration for autonomous vehicle navigation systems is
considered and tested with software-in-the-loop simulation
(SILS).
In addition, we consider attack
detection algorithms autonomous multi-vehicle systems with
imperfect information. This research addresses how a
locally controlled autonomous agent can be identified by
other agents if it has been compromised and how to make
decisions with the ultimate goal of recovering system
functionality and safety.
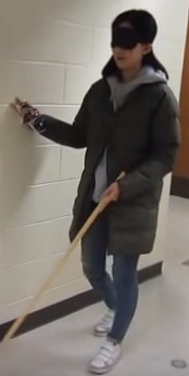
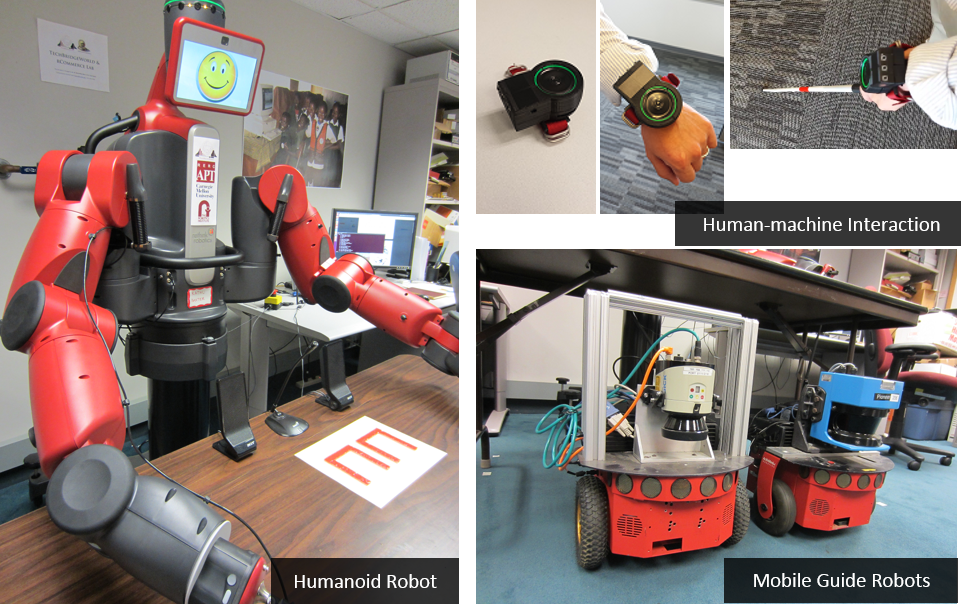
Interactive Indoor Navigation Aid System for Visually Impaired People
The World Health Organization (WHO)
estimates that 285 million people in the world are
visually impaired, of whom 39 million are blind. Although
safe and independent mobility is a critical element of
modern life, traveling in unfamiliar environments can be
challenging and often daunting for visually impaired
people due to the lack of appropriate navigation aid
tools. In order to get familiarity with new places,
visually impaired people usually take many times of
mobility training through orientation & mobility
instructors or their family. However, this training is
time consuming and expensive for all the parties.
Furthermore, it often appears to be challenging for
visually impaired people to memorize all the steps to
navigate new places independently. The objective of this
project is to develop improved and appropriate navigation
aid tools that will enable visually impaired people to
travel unfamiliar environments safely and independently
with minimal training and effort.