Field and Service Robotics
Autonomous Robotic Teams for a Real-Time Water Monitoring
Water monitoring is an important task to conserve natural resources such as rivers and lakes. For a long period of time water monitoring methods have been based on the human activities. For example, water sampling is the most common human activity. However, this technique entails some inherent disadvantages. In case of a large river with fast flow, it is dangerous to the samplers. Moreover, it is slow and costly because human samplers should travel to sites for conducting a water sampling on their own. Also, it is inefficient for a long-term and real-time monitoring. Recently, autonomous water monitoring systems composed of mobile sensors for real time monitoring and data collection have been introduced. Unmanned Aerial Vehicle (UAV) and Unmanned Surface Vehicle (USV) are proposed to overcome the disadvantages of the human based methods.
The goal of this research is to develop a continuous, real-time autonomous river monitoring system. We are planning to develop the autonomous robotic teams that integrate a variety of technologies including robots, crowdsourcing, advanced region of interest (ROI) selection and path planning. For this research ‘Wabash River’ is the targeted test site because it is the one of the longest rivers in the US and main stream in Indiana state. This research is at the beginning stage. Based on the needs assessment, this system will be iteratively designed to be fully capable of various tasks, such as water sampling, water pollution monitoring, sediment sampling, and early flood warning.

Autonomous Aerial Vehicles for Force Health Protection Response
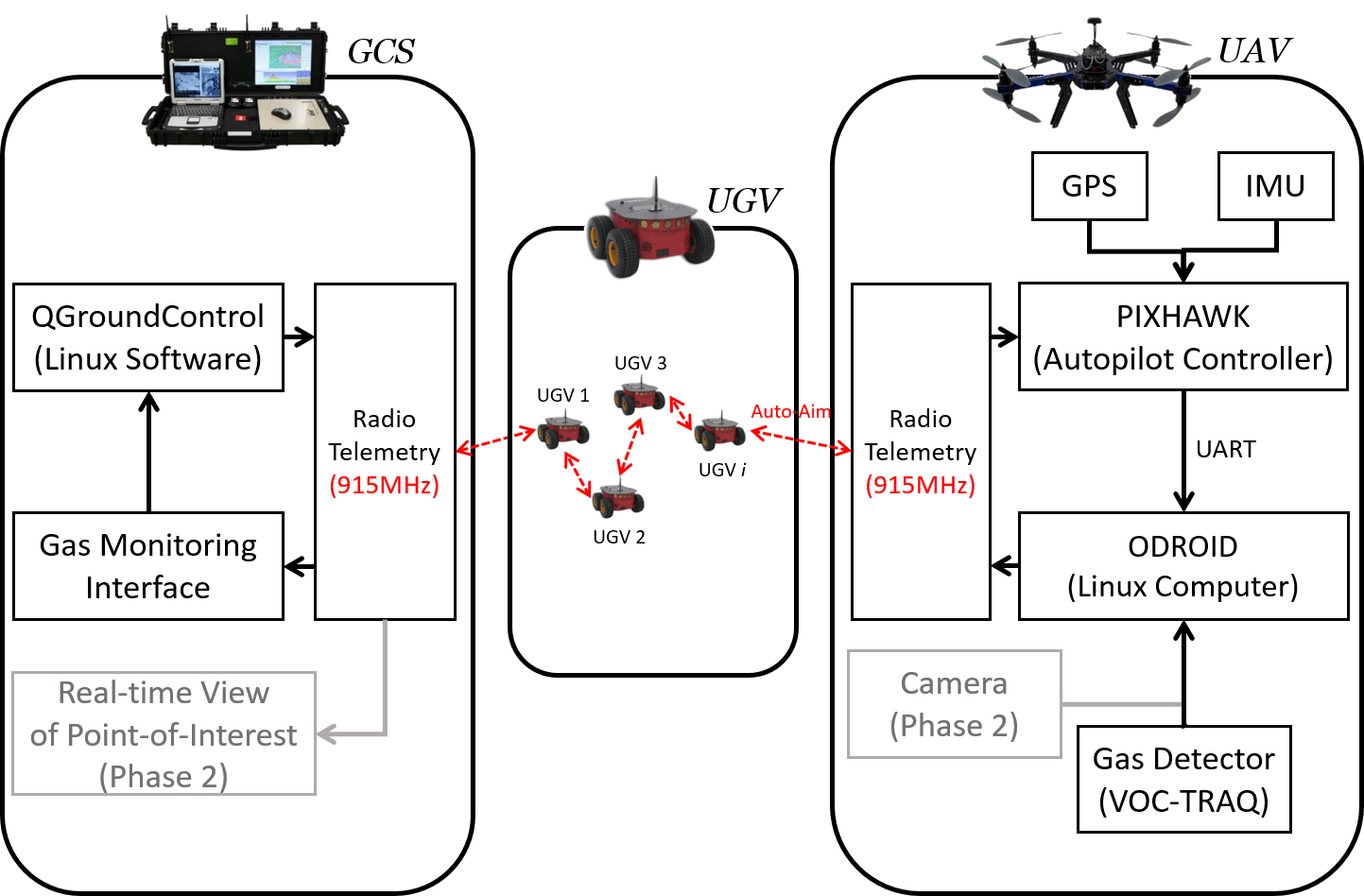
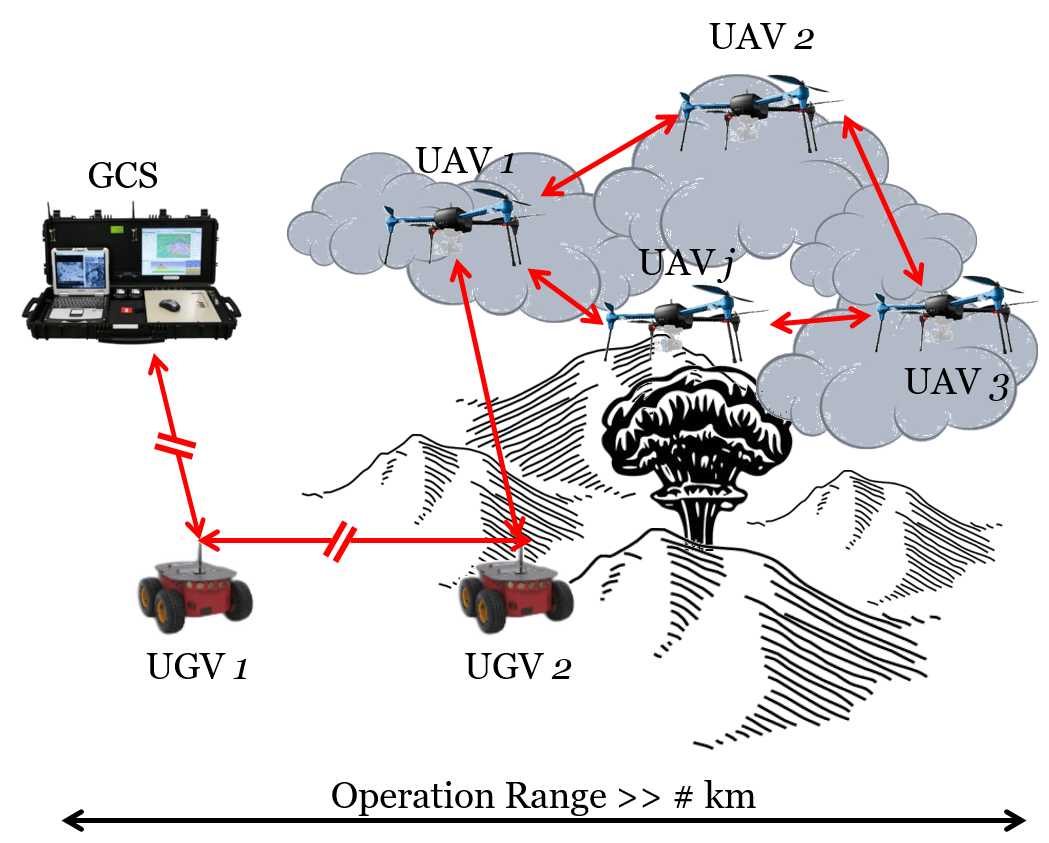
Early detection and immediate response are significant to reduce the damage caused by national disasters. For example, the first responder reports suspicious gas leak in an unsecured area. In this situation, the proposed autonomous system in this project can deploy a group of unmanned aerial / ground vehicles to analyze the harmfulness of gas instead of manpower. Therefore, the goal of this project is to develop an autonomous system which has abilities of: 1) Detecting and analyzing chemical compounds in suspicious gas leak, 2) Using the combination of unmanned aerial vehicles and unmanned ground vehicles, and 3) Streaming real-time view of point-of-interest at long range.
This project requires various skill sets so the proposed system can be divided into three teams; Team AIR, Team BASE, and Team GAS. The goal of each team is the following:
Team AIR - 1) Design a customized drone which can carry a camera and gas detection kit, 2) Develop proper guidance, navigation, and control systems such as path planning for autonomous mission.
Team BASE - 1) Design the user interface for real-time visualization of the gas sensor, 2) Create the monitoring system of live view for the camera on the drone.
Team GAS - Build a gas detection kit which is able to: 1) Send gas sensor data to Team BASE via 915MHz, 2) Receive on-board sensor data of the drone via USB port, 3) Be compact and light-weight (maximum payload: 1000g).