
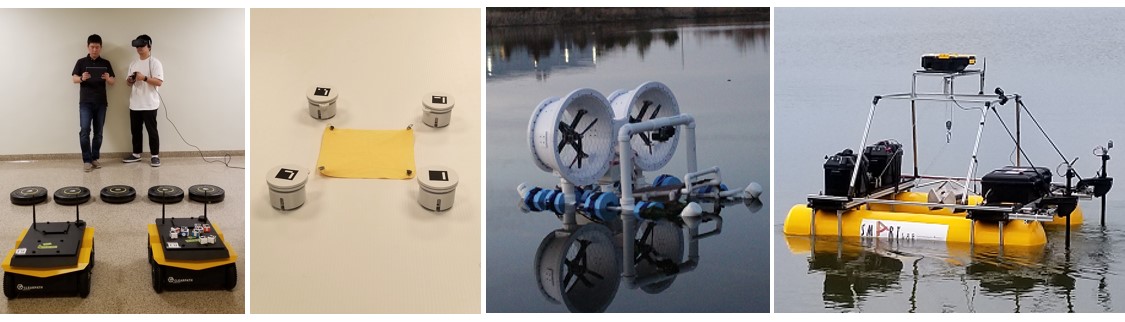
Adaptive Human Multi-robot Systems


Description: The ultimate goal of
this research is to develop adaptive human multi-robot systems
that can flexibly respond to changes in situation and task
needs. We develop methods for real-time monitoring and
analysis of the cognitive and emotional state of operators,
enabling human operators to adapt to robot system changes and
robots to adapt to human cognitive and emotional states. By
developing adaptive systems to improve the performance of
human-robot teams, we advance our understanding of human
multi-robot interactions. The new technologies provided will
improve function of human multi-robot teams deployed (for
example) in environmental monitoring, nuclear cleanup,
disaster response, and defense. This research also advance
STEM education and workforce development by involving K-12
students, undergraduate and graduate women, minorities, and
underrepresented groups in human-robot interaction and
multi-robot systems.
Grants: NSF
People: Wonse
Jo, Go-Eum
Cha, Ruiqi
Wang, Jeremy
Pan, Revanth Krishna Senthilkumaran
Project Website: https://polytechnic.purdue.edu/ahmrs
Selected Publications:
- Wonse Jo, Robert Wilson, Jaeeun Kim, Steve McGuire, and Byung-Cheol Min, "Toward a Wearable Biosensor Ecosystem on ROS 2 for Real-time Human-Robot Interaction Systems", 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Workshop on HMRS 2021: Cognitive and Social Aspects of Human Multi-Robot Interaction, Prague, Czech Republic, Sep 27 – Oct 1, 2021. Paper Link, Video Link, GitHub Link
- Wonse Jo, Jaeeun Kim, and Byung-Cheol Min, "ROS2
Open-Source Swarm Robot Platform: SMARTmBot", 2021
International Conference on Robotics and Automation (ICRA),
Workshop on Robot Swarms in the Real World: From Design to
Deployment - Live Demonstration, Xi'an, China, May 30 - June
5, 2021. GitHub Link, Video Link
- Wonse Jo, Shyam Sundar Kannan, Go-Eum Cha, Ahreum Lee, and Byung-Cheol Min, "ROSbag-based Multimodal Affective Dataset for Emotional and Cognitive States", 2020 IEEE International Conference on Systems, Man and Cybernetics (SMC), Toronto, Canada, 11-14 October, 2020. Paper Link
- Tamzidul Mina, Shyam Sundar Kannan, Wonse Jo, and
Byung-Cheol Min, "Adaptive Workload Allocation for
Multi-human Multi-robot Teams for Independent and
Homogeneous Tasks", IEEE Access, Vol. 8, pp. 152697-152712,
2020. Paper Link, Video Link
Autonomous Robotic Teams for a Real-Time Water Monitoring
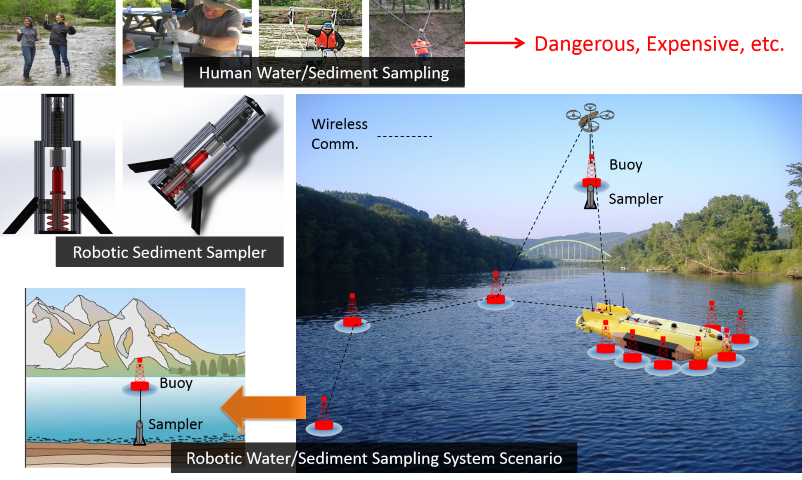
Description: Water monitoring is
an important task to conserve natural resources such as
rivers and lakes. For a long period of time water monitoring
methods have been based on the human activities. For
example, water sampling is the most common human activity.
However, this technique entails some inherent disadvantages.
In case of a large river with fast flow, it is dangerous to
the samplers. Moreover, it is slow and costly because human
samplers should travel to sites for conducting a water
sampling on their own. Also, it is inefficient for a
long-term and real-time monitoring. Recently, autonomous
water monitoring systems composed of mobile sensors for real
time monitoring and data collection have been introduced.
Unmanned Aerial Vehicle (UAV) and Unmanned Surface Vehicle
(USV) are proposed to overcome the disadvantages of the
human based methods.
The goal of this research is to develop a
continuous, real-time autonomous river monitoring system. We
are planning to develop the autonomous robotic teams that
integrate a variety of technologies including robots,
crowdsourcing, advanced region of interest (ROI) selection
and path planning. For this research ‘Wabash River’ is the
targeted test site because it is the one of the longest
rivers in the US and main stream in Indiana state. This
research is at the beginning stage. Based on the needs
assessment, this system will be iteratively designed to be
fully capable of various tasks, such as water sampling,
water pollution monitoring, sediment sampling, and early
flood warning.
Grants: NSF, UNSA, Purdue University
People: Wonse
Jo, Pou
Hei Chan
Project Website: https://engineering.purdue.edu/PRWQ
Selected Publications:
- Jun Han Bae, Wonse Jo, Jee Hwan Park, Richard M. Voyles, Sara K. McMillan and Byung-Cheol Min, "Evaluation of Sampling Methods for Robotic Sediment Sampling Systems", IEEE Journal of Oceanic Engineering, Vol. 46, No. 2, pp. 542-554, April 2021. Paper Link, Video Link
- Jun Han Bae, Shaocheng Luo, Shyam Sundar Kannan, Yogang Singh, Bumjoo Lee, Richard M. Voyles, Mauricio Postigo-Malaga, Edgar Gonzales Zenteno, Lizbeth Paredes Aguilar, and Byung-Cheol Min, "Development of an Unmanned Surface Vehicle for Remote Sediment Sampling with a Van Veen Grab Sampler", 2019 MTS/IEEE OCEANS, Seattle, WA, USA, October 27-31, 2019. Paper Link, Video Link
- Wonse Jo, Jee Hwan Park, Yuta Hoashi, and Byung-Cheol Min, "Development of an Unmanned Surface Vehicle for Harmful Algae Removal", 2019 MTS/IEEE OCEANS, Seattle, WA, USA, October 27-31, 2019. Paper Link, Video Link
- Shaocheng Luo, Yogang Singh, Hanyao Yang, Jun Han Bae, J. Eric Dietz, Xiumin Diao, and Byung-Cheol Min, "Image Processing and Model-Based Spill Coverage Path Planning for Unmanned Surface Vehicles", 2019 MTS/IEEE OCEANS, Seattle, WA, USA, October 27-31, 2019. Paper Link
- Wonse Jo, Yuta Hoashi, Lizbeth Leonor Paredes Aguilar,
Mauricio Postigo-Malaga, José Garcia-Bravo, and
Byung-Cheol Min, "A Low-cost and Small USV Platform for
Water Quality Monitoring", HardwareX, Vol. 6, e00076,
October 2019. Paper Link, Source Codes, Video Link